Accueil du site |
Accessibilité |
Rechercher |
Menu |
Contenu |
Plan du site |
Se connecter |
Contact
°°TechNoLand°°

°°TechNoLand°°
Cours de technologie de Mr Chamayou
Langues du site :



 RSS
RSS
Rubriques
 Troisieme
Troisieme
- La technologie en troisième
-
 Jeu des codes secrets
Jeu des codes secrets
 Exercices de révision sur le dessin technique
Exercices de révision sur le dessin technique
- Créer la page de garde
-
Outils numériques
- Utiliser le langage HTML
- Transférer des fichiers sur un serveur web
- Créer un clef usb "Lubuntu" bootable
- Mettre en forme des pages avec le CSS
- Internet est il dangereux ?
Réaliser un projet multimédia
- Les films en Stop Motion
- Exercices de prise en main du stop motion
- Logiciels de stopmotion
- Les images numériques
- Réaliser une animation en StopMotion
Autres robots pour aller plus loin
- Programmer le robot avec Scratch2
- Robot Roby
-
3.Des defis pour un robot
- Le concours et ses défis
- Planifier et organiser le projet
- Le cahier des charges du robot
- Dessins 3D du robot avec Sketchup
Réalisation de pièces de robotique
- Chassis de Robot imprimé
- Support de capteur de distance à ultrason
- Support de capteurs de ligne
- Fabriquer avec CharlyGraal
Robot 2013 Robux
En attendant le brevet...
Evolution des objets techniques
- Histoire des objets techniques
- Organiser un travail en équipe
- Réaliser un questionnaire en ligne avec kwiksurveys
- La télévision
- Le téléphone
- Les lecteurs de musique
- Les robots
- Les ordinateurs
- Les appareils photographiques
- Les consoles de jeux
Concevoir un robot programmable simple
-
 Défis et contraintes
Défis et contraintes
-
 Les fonctions du robot
Les fonctions du robot
- Réaliser une revue de projet
-
 Exercice : Le robot Marcheur Hexatec
Exercice : Le robot Marcheur Hexatec
-
 Choix des composants du robot
Choix des composants du robot
-
 Modéliser la fixation du Servomoteur
Modéliser la fixation du Servomoteur
-
 Modéliser le robot en 3D
Modéliser le robot en 3D
- La troisième roue du robot
-
 Programmer le robot avec Arduino
Programmer le robot avec Arduino
- Modélisation du support de pile 9V
Robot Suiveur de Ligne
Scratch et Arduino
- Programmer la carte Arduino

- Simuler les défis avec Scratch
- Branchements des éléments du robot sur Tinker
-
Programmer des déplacements du robot
Robot suiveur de ligne
Robot détecteur d’obstacles
- Capteur à InfraRouge
- Détecter des obstacles avec un capteur à ultrasons
- Utiliser un capteur à UltraSon
- Eviter les obstacles avec des moustaches
Robot sumo
L’énergie dans les objets
- Quatrième
- La technologie en 4°
- Réaliser la page de garde du classeur
-
Utiliser le réseau informatique
- Les constituants de l’ordinateur
- Fonctions et coût d’un ordinateur
- Le langage de l’ordinateur
- Le fonctionnement d’internet
-
 Créer un site web sur le PC
Créer un site web sur le PC
- Comment retoucher des images avec Photofiltre ?
- Les dangers d’Internet
- Comment retoucher des fichiers audio ?
- Comment choisir une connection Internet ?
Dessiner des objets en 2D et 3D
- Le dessin d’objet technique
- Initiation au dessin 3D avec Sketchup
-
 Aménager un conteneur habitable avec Sketchup
Aménager un conteneur habitable avec Sketchup
- Conception d’un MiniRover
Projets divers
La programmation
- Découverte de la domotique
- Fonctionnement d’une écluse (Logigramme)
- Formes géométriques avec Scratch2
- Jeu : Le chat et la souris avec Scratch2
- Simuler des systèmes automatiques
- Site web : la maison domotisée
- Les feux de carrefour (avec MaqPlus)
- Le robot aspirateur (avec Scratch)
- L’alarme d’une maison
- Creer un jeu avec Scratch
-
Créer un jeu avec Arduino
Programmer des maquettes avec Picaxe
L’éclairage et ses ampoules
- Comprendre la lumière
- Comparaison des ampoules (TP)
- Fabriquer des boîtes de test pour l’éclairage (Gr)
- L’énergie
- Changer ses ampoules ?
- Quelle ampoule choisir dans une maison ?
- Découvrir l’énergie solaire
-
Commander un système d’éclairage
Le portail automatique
-
Analyse fonctionnelle du portail automatique
-
 Modélisation 3D de la maquette du portail
Modélisation 3D de la maquette du portail
- Choix des composants du portail automatique
- Synthèses Projet Portail
- Simulation du portail automatique
- Fabriquer la maquette du portail
- Les composants analogiques et numériques
- Programmation du portail avec Arduino
les systèmes de chauffage
Fabriquer
- Fabriquer des modules pour Arduino
- Imprimer des objets
- Maquettes de pièces de maison
-
Programmer un système
programmation de systèmes motorisés
Histoire de la domotique
- L’histoire des objets de la maison
- Comparer des objets de différentes époques
- Etude du lave linge
- Le confort aujourd’hui
programmer

- Cinquième
-
 Page de garde
Page de garde
-
Informatique
- Utiliser la messagerie
- L’organisation des fichiers
- Jeu du mot mystère
- Simuler des messages dans un réseau
- Réaliser un quizz sur l’informatique
Concevoir une habitation
- Les fonctions techniques d’une habitation
-
 Les contraintes d’une construction
Les contraintes d’une construction
-
 Dessiner une maison simple
Dessiner une maison simple
-
 Dessiner une maison à étages
Dessiner une maison à étages

-
 Aménager une habitation
Aménager une habitation
-
 Orienter la maison
Orienter la maison
-
 Concevoir la maison
Concevoir la maison
-
 Se protéger du soleil
Se protéger du soleil
-
Pour aller plus loin
Histoire et diversités des constructions
- Les différents types de construction
- Comment construire un mur ?
- Monuments religieux : Eglise des Jacobins
- Les différents habitats du monde
- L’évolution de l’architecture
- L’arche (TP)
- L’évolution d’un objet
- Réaliser un diaporama
- La yourte
- Les écoquartiers
- L’achitecture sur les billets de banque
Les ponts
- Les différents types de pont
- Le principe des ponts en structure treillis
- Construire des ponts avec BridgeBuilder
- Construire une maquette de pont
- La tour Eiffel
- La résistance d’un pont
Créer un meuble
Dessin 2D & 3D d’un objet technique
- Les règles de dessin technique
- Réaliser un quizz sur le dessin
- Dessiner une maison en 2D
- Tracé d’un plan de maison dans la cour
- Modifier une habitation avec SweetHome
- Amélioration d’un skatepark
- Les échelles et les surfaces
- Implanter une maison avec Sketchup
- Un auvent pour économiser l’énergie
- Ma Pierre à l’Edifice
- Réaliser des patrons avec Sketchup et Pepakura
Projet de bungalow
-
 Aménagement du lotissement
Aménagement du lotissement
-
 Aménagement intérieur
Aménagement intérieur
-
Evaluation du coût du bungalow
-
 Réalisation des bungalows
Réalisation des bungalows
Les matériaux de construction et leurs propriétés
- Réalisation de boîtes de test thermique
- La menace climatique
- L’origine des matières premières
- Les matériaux d’une maison
- Tracer des courbes avec Squeakbot
- Réaliser un capteur de température
- Les maisons bioclimatiques
- Les gestes de tous les jours
L’énergie dans les systèmes
- Les transformations de l’énergie
- Implanter un capteur solaire
- Chaine d’énergie dans la production d’eau chaude
Le tableur grapheur
-
- Sixième
- Présentation du programme
- La page de garde du classeur
-
L’utilisation de l’informatique
Programmation
L’objet technique et ses fonctions
- L’objet technique et son usage
- Etude de différents objets
- Créer un quizz sur les objets techniques
- Les liaisons entre les pièces
- La fonction suspension
- La transmission du mouvement
- Fabriquer les maquettes "transmission"
Les matériaux et leurs propriétés
- les grandes familles de matériaux
- Tests sur des matériaux
- La deuxième vie des déchets
- Utilisation de l’acier
Les énergies dans les objets
Réalisation d’un projet
Etude du vélo

- Classer les vélos
- L’histoire du vélo
- Les éléments du vélo
- Les fonctions techniques et les mouvements
- le freinage du vtt
Créer une animation Scratch

Le dragster
- Segpa
-
Informatique
- Découverte de l’odinateur
- Mixer du son avec Audacity
- Dessiner une maison avec SweetHome 3D
- Utiliser le clavier et la souris
- Les dangers d’Internet
- Utiliser OpenOffice Texte
- L’organisation des fichiers
- Retoucher des images avec Photofiltre
- Créer des pages web
Fabrication de robots
Programmer
Réalisations
Les Matériaux
-
Contrôler un moteur avec le LM293
13 avril 2011 - Dernier ajout 15 novembre 2015
par
par
Un moteur se met en mouvement quand il reçoit de l’électricité.
![]() La carte Arduino ne délivre pas assez de courant pour alimenter un moteur,
La carte Arduino ne délivre pas assez de courant pour alimenter un moteur,
![]() Pour changer le sens de rotation, il faut inverser la polarité.
Pour changer le sens de rotation, il faut inverser la polarité.
On utilisera donc un composant électronique qui règle ces deux problèmes : Le LM293
Solution 1 : le Rotorshield de SnootLab

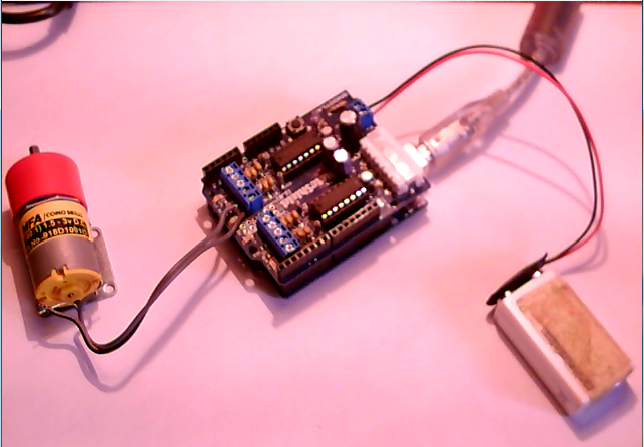
Librairie Snootor à télécharger
Explications de fonctionnement sur le forum SnootLab
//Librairies necessaires
#include <Wire.h>
#include <snootor.h>
// Declaration
SnootorDC Motor_1;
SnootorDC Motor_2;
int i;
void setup(){
// Initialization
Serial.begin(115200);
Wire.begin();
Motor_1.init(1);
Motor_2.init(2);
Serial.println("init ok");
}
void loop(){
Serial.print("Round ");
Serial.println(i++);
SC.dump();
// run forward at maximal speed
Motor_1.setSpeed(2);
Motor_2.setSpeed(255);
Motor_1.run(FORWARD);
Motor_2.run(FORWARD);
delay(2000);
// stop for 2 seconds
Motor_1.run(RELEASE);
Motor_2.run(RELEASE);
delay(2000);
// run backward at maximal speed
Motor_1.setSpeed(2);
Motor_2.setSpeed(255);
Motor_1.run(BACKWARD);
Motor_2.run(BACKWARD);
delay(2000);
// stop for 2 seconds
Motor_1.run(RELEASE);
Motor_2.run(RELEASE);
delay(2000);
}Solution 2 : LM293 sur une plaque de test

Commande du LM293 :

On testera ici avec un seul moteur : accélération dans un sens puis accélération dans l’autre :
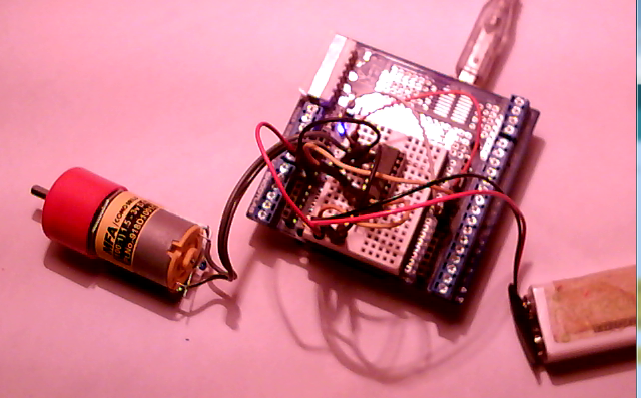
On utilise analogWrite(pin,valeur) pour envoyer le signal pwm. la valeur est comprise entre 0 et 255.

int motor_enablePin = 10; //pwm
int motor_in1Pin = 8;
int motor_in2Pin = 7;
void setup()
{
//on initialise les pins du moteur
pinMode(motor_in1Pin, OUTPUT);
pinMode(motor_in2Pin, OUTPUT);
pinMode(motor_enablePin, OUTPUT);
}
void loop()
{
// accélération dans un sens
for (int i=0 ; i<256 ; i++)
// on "écrit" la vitesse (i) sur la patte 10 de l’Arduino
{
analogWrite(motor_enablePin,i);
digitalWrite(motor_in1Pin,HIGH);
digitalWrite(motor_in2Pin,LOW);
delay(100) ;
// le délai détermine la pente de l’accélération (en ms)
}
delay(1000) ;
// accélération dans l'autre sens
for (int i=0 ; i<256 ; i++)
// on "écrit" la vitesse (i) sur la patte 10 de l’Arduino
{
analogWrite(motor_enablePin,i);
digitalWrite(motor_in1Pin,LOW);
digitalWrite(motor_in2Pin,HIGH);
delay(100) ;
}
}Commander la sortie PWM par un potentiomètre :
Exemple d’un potentiomètre sur l’entrée 5 et un moteur sur la 9.
int motor = 9;
int potenciometer = 5;
void setup(){
pinMode(9,OUTPUT);
pinMode(5,INPUT);
}
void loop(){
int value = analogRead(potenciometer);//lecture valeur (0 à 1023)
int motor_speed = value/4;//PWM (0 à 255)
analogWrite(motor,motor_speed);
}Ressources : Descriptifs de composants électroniques :
